Mechanical & Robotics R&D Engineer
Moustafa
Moustafa
Sharaf
precision into things that move
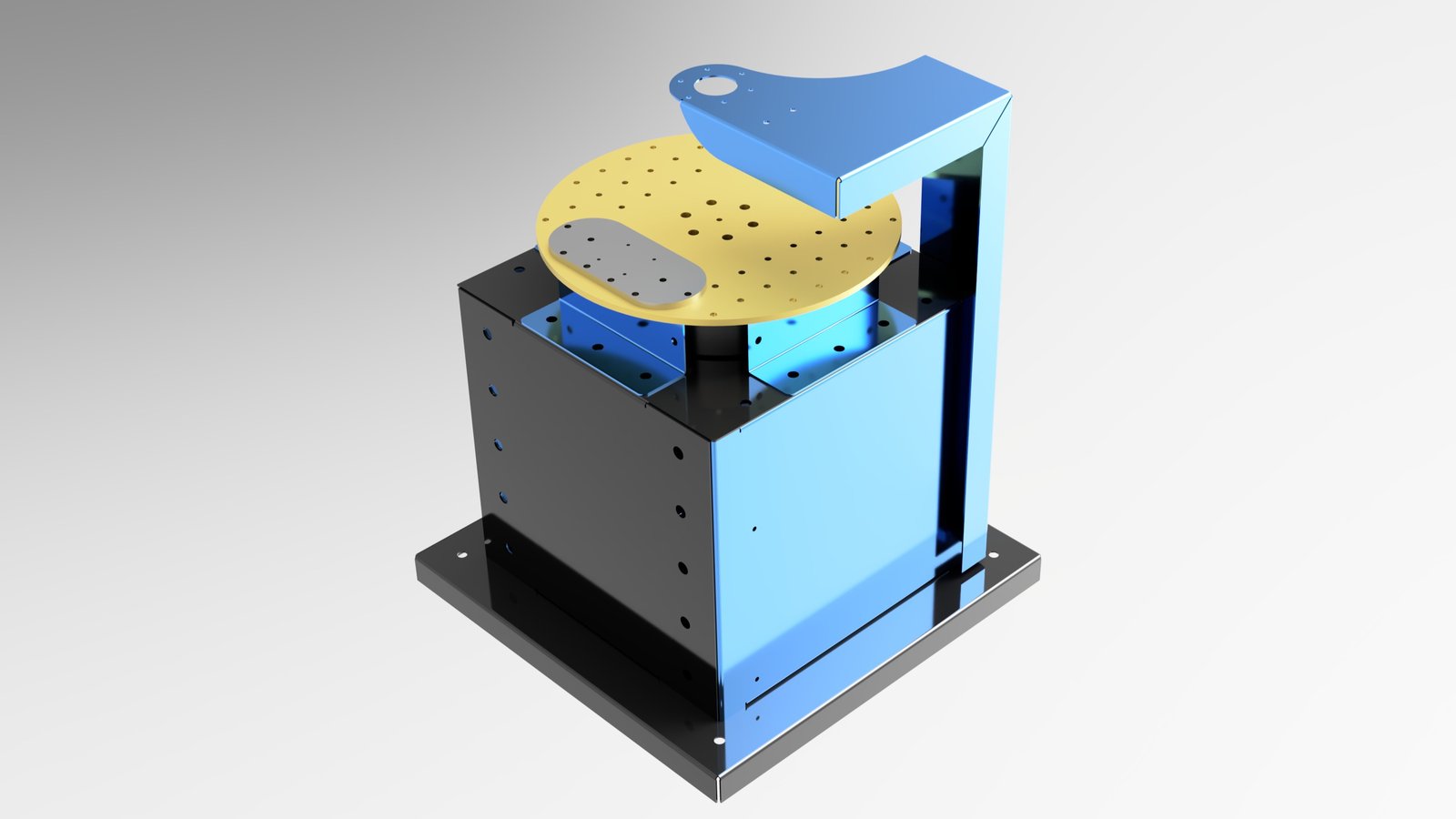
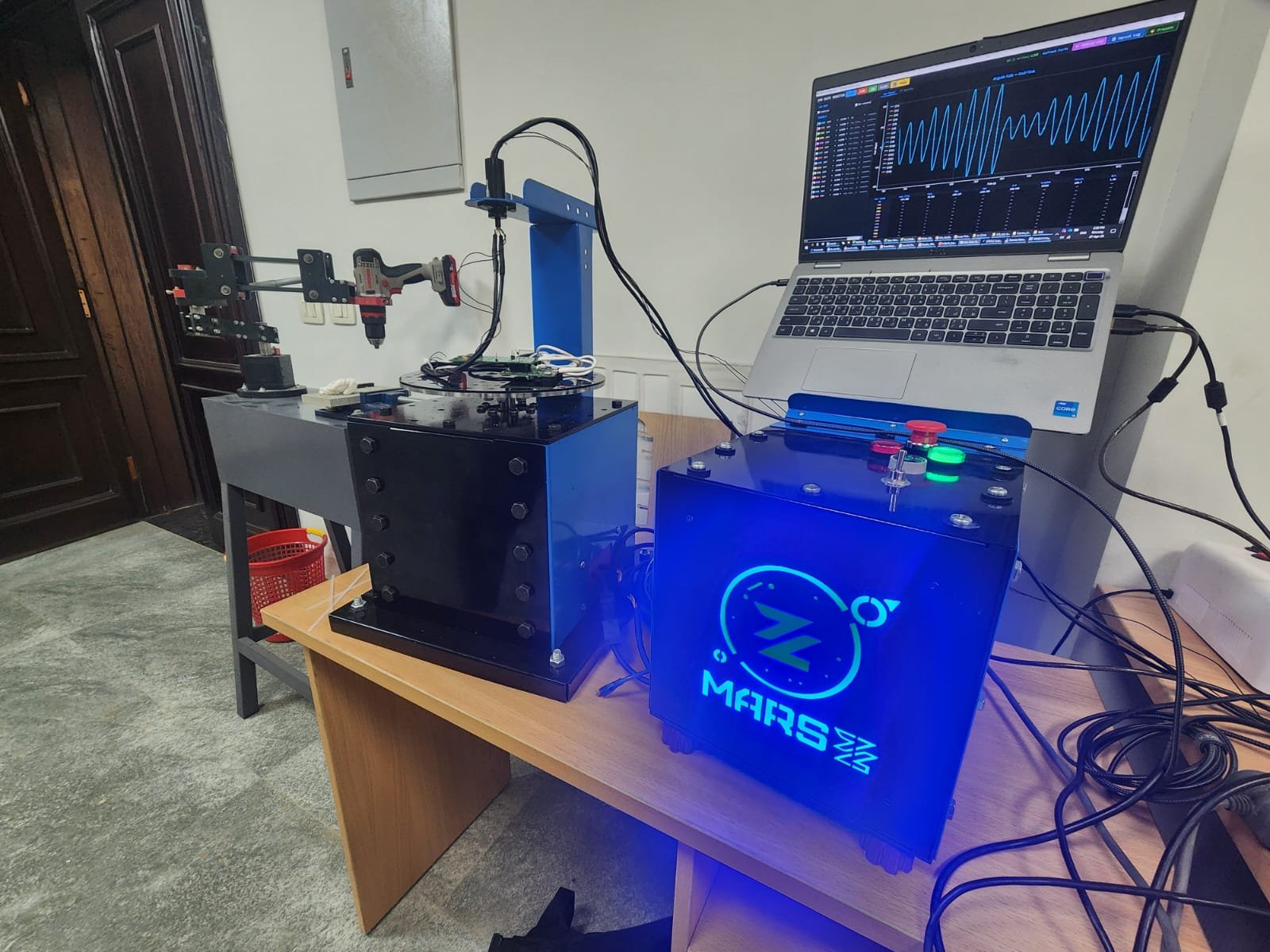
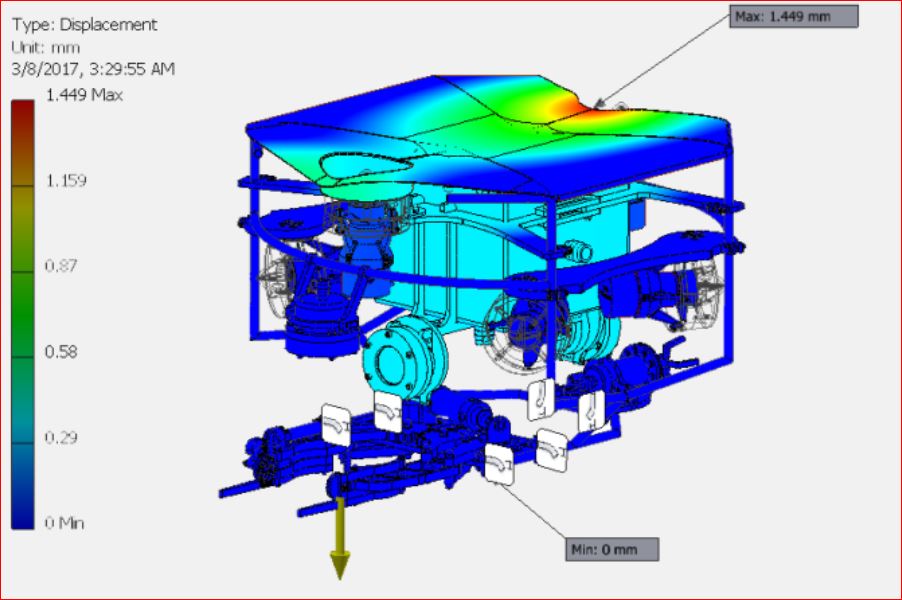
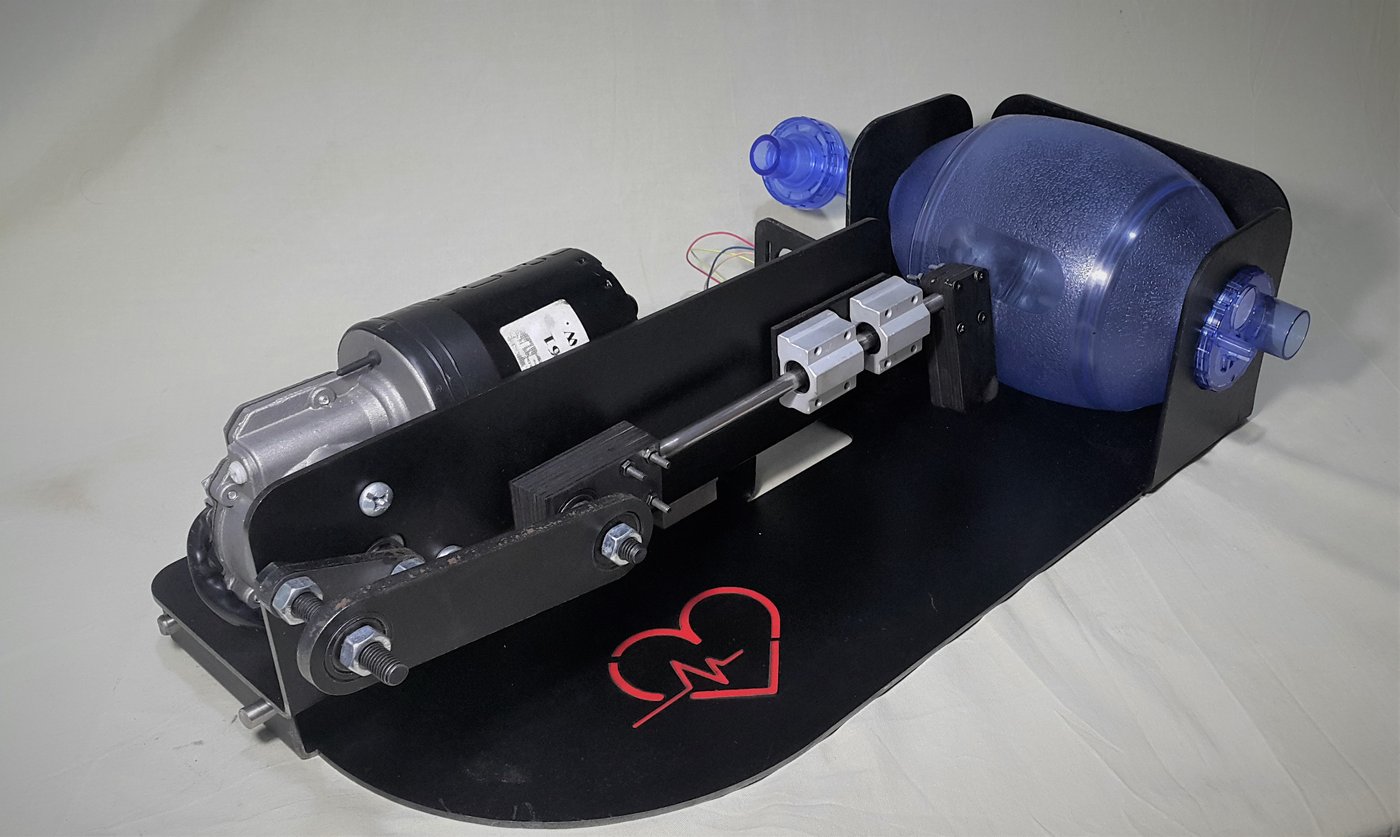
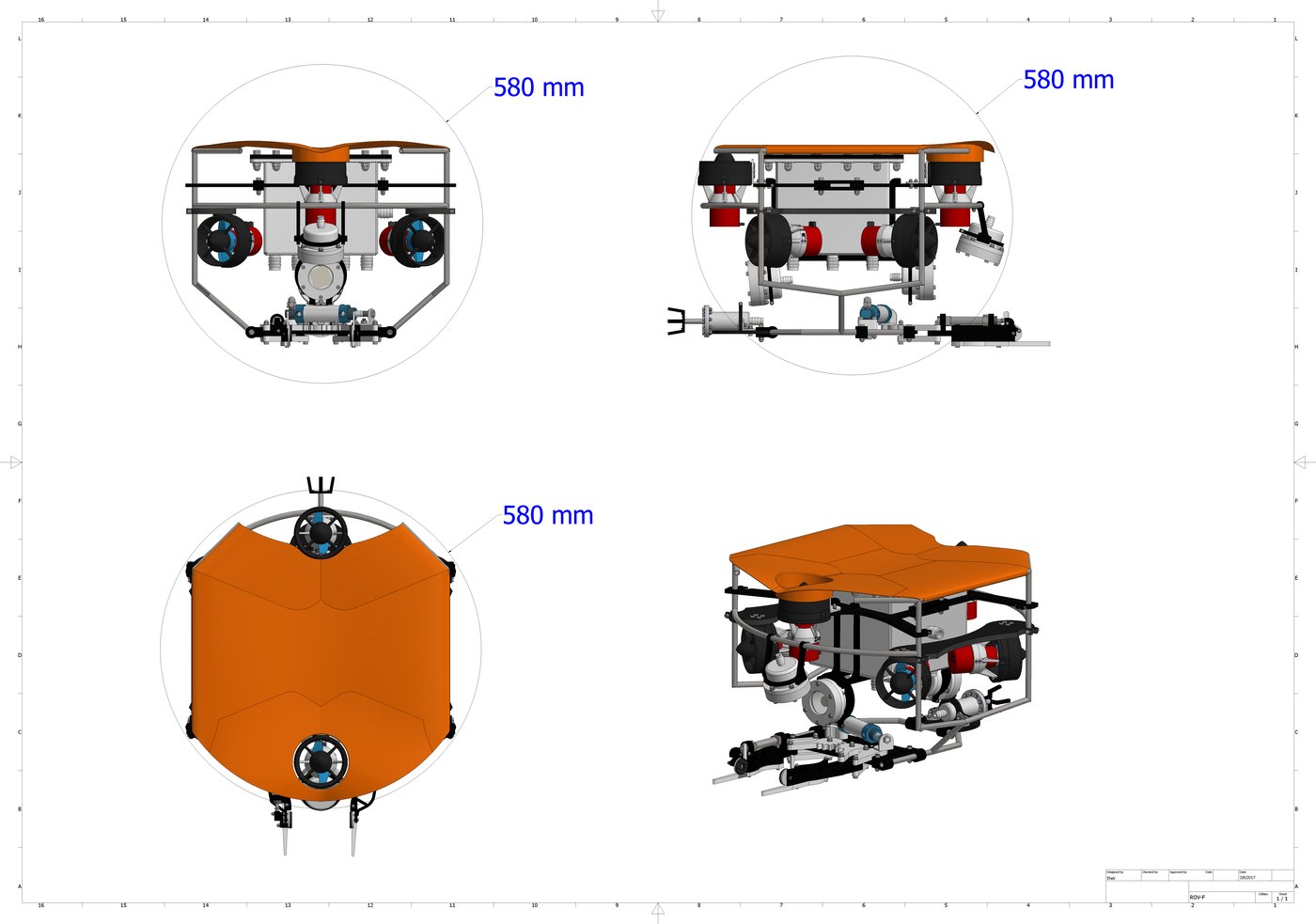
I design and build electromechanical and robotic systems end to end, from concept and CAD to working, field tested hardware.
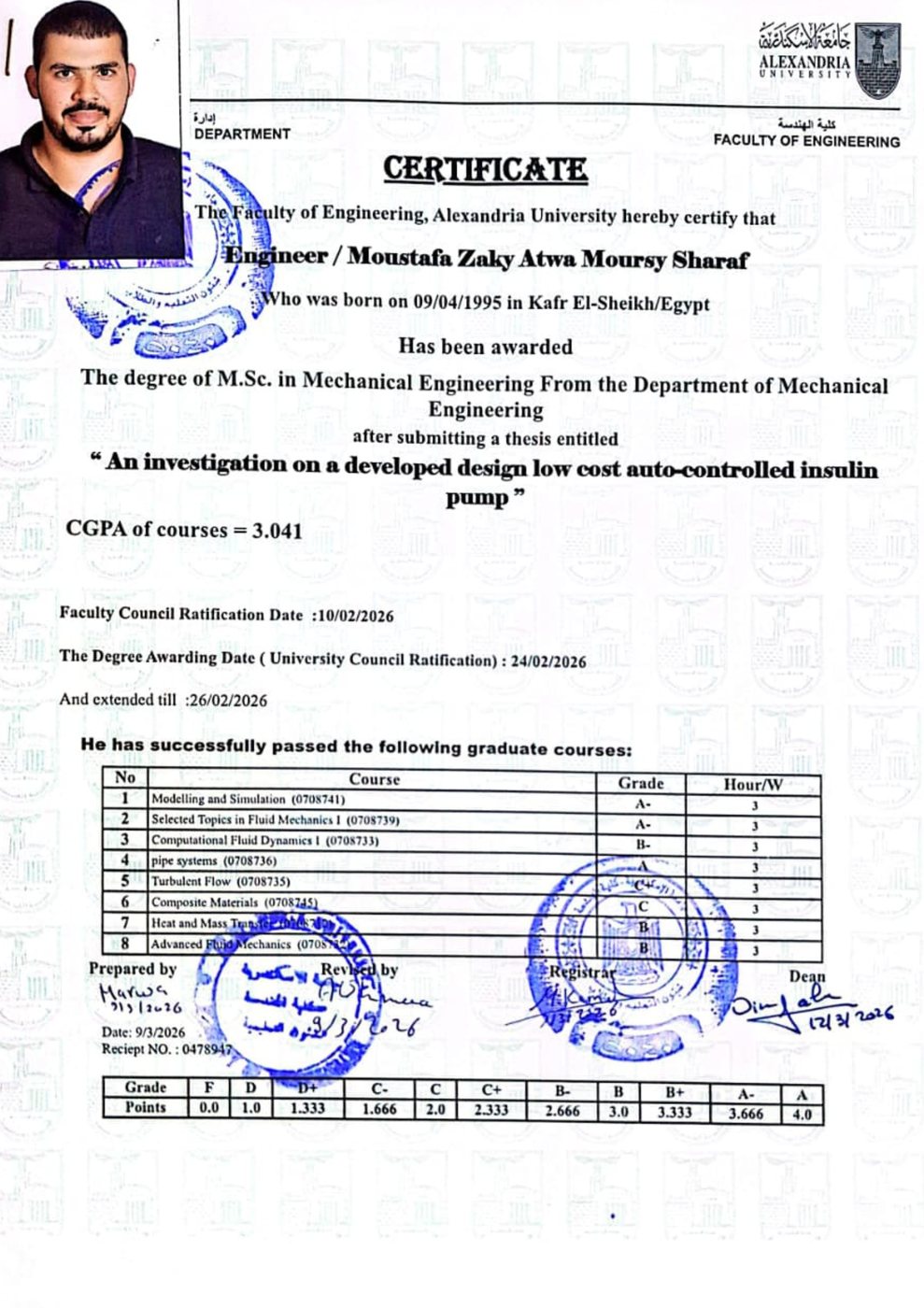
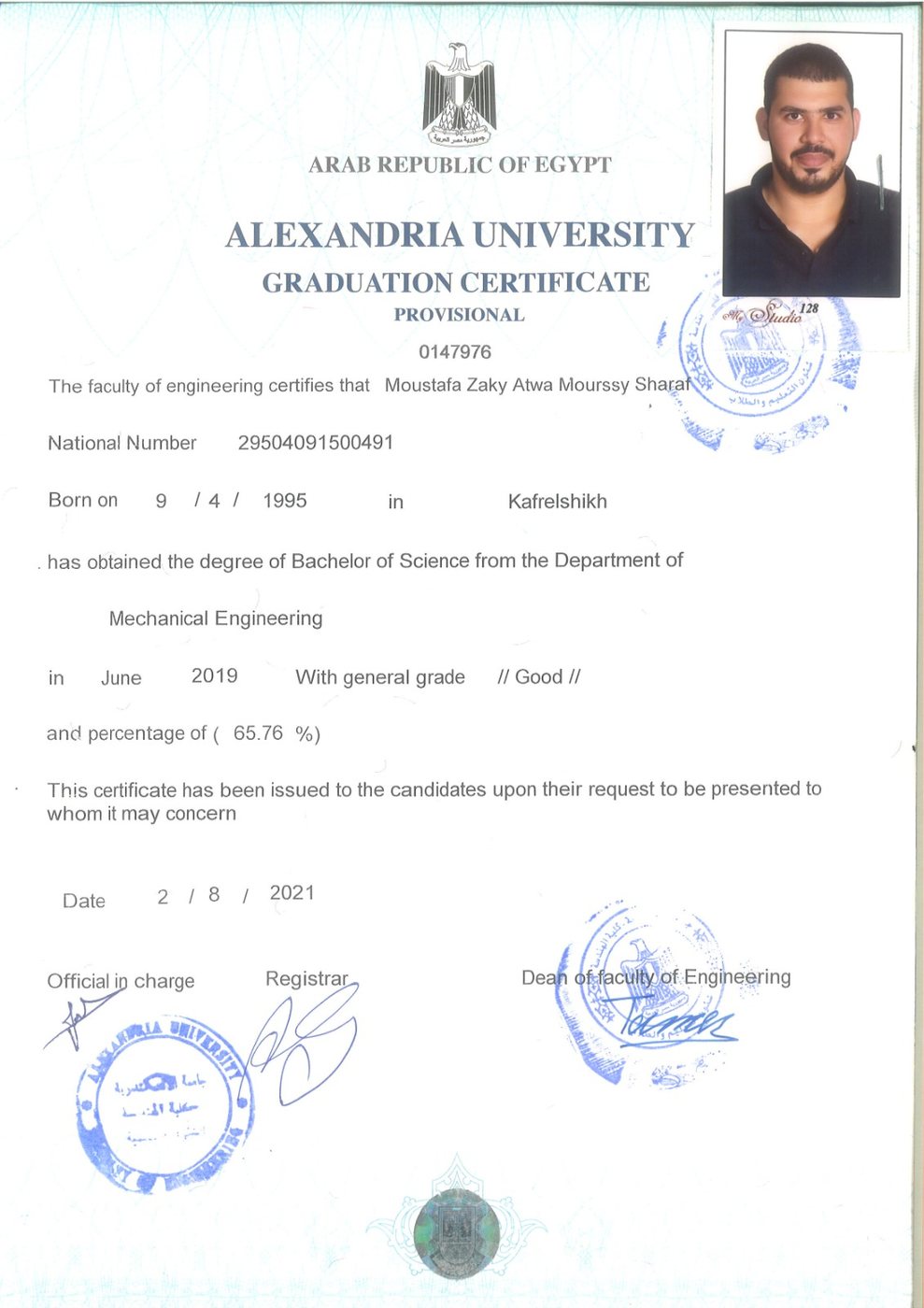
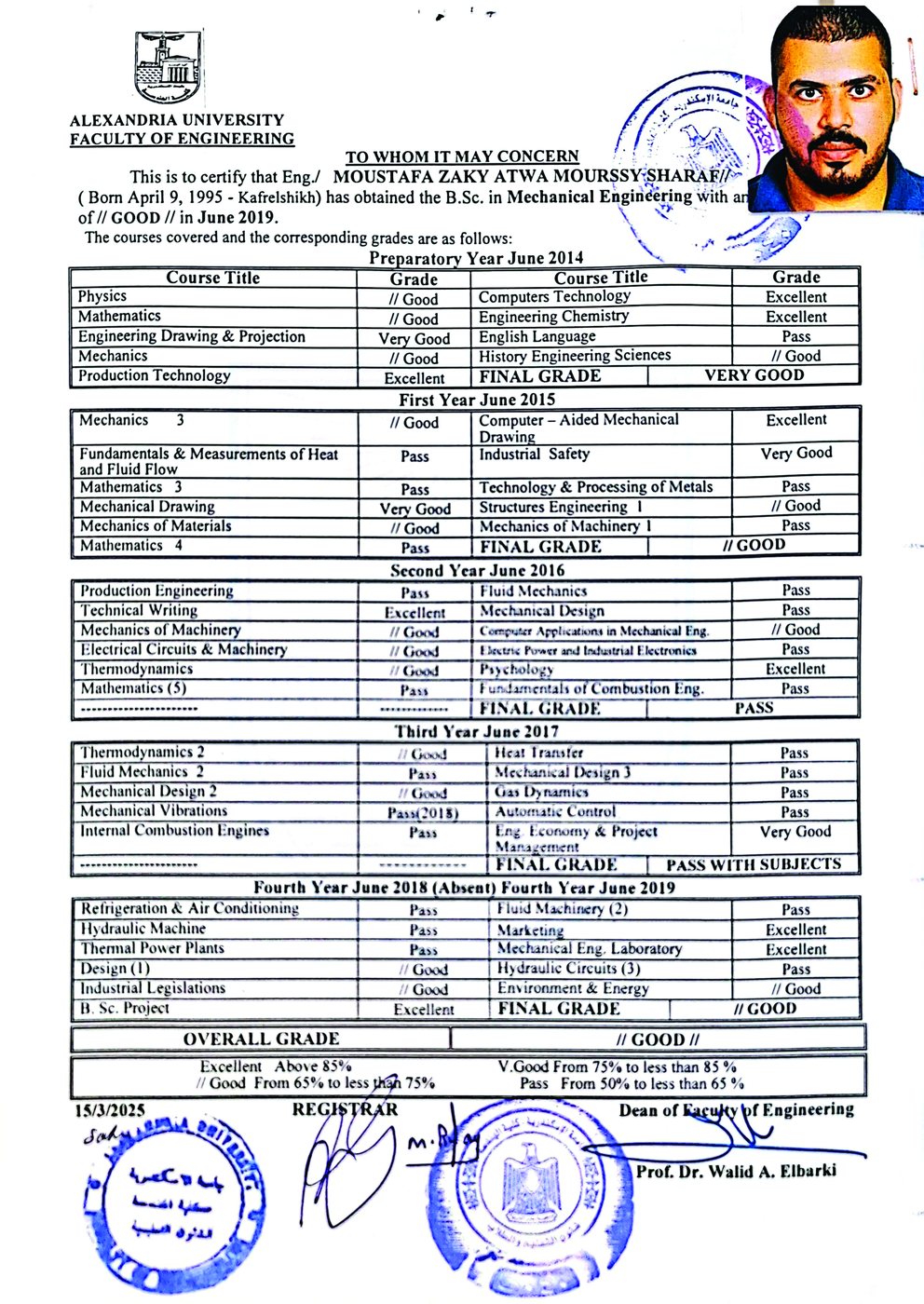
M.Sc. Mechanical Engineering / 25+ systems delivered / 3 peer reviewed publications

● Alexandria, EG
++
Moustafa SharafM.Sc. Mechanical Eng.